3D Laser Scan To BIM
Pointcloud Scan to BIM, how to 3D Laser Scan a Large Shopping Center
The Challenge
Site to be scanned was occupied by tenants and some areas had restricted security access. A vacant movie theater with no electricity making it very difficult for our crew to navigate the space. Cars moving in and out of the parking lot, and finally, humid Houston weather with 95-degree temperature.
Site description below:
Mixed use shopping center with laboratories, and a vacant movie theater. Total Project Area= 10.5 Acres including parking lots, buildings and driveways. Total Area of Buildings = 167,270 sqf One of the major challenges was coordinating the field laser scanning activities without disrupting the tenants. Project required very clear planning upfront to ensure seamless imaging and high quality pointcloud data.
The Client
Our client was an engineering and architectural consulting firm that was tasked with performing BOMA analysis, and proposing renovations to the center. To give you a better understanding of the requirement, according to the Building Owner and Manager Association (BOMA) International, “When leasing or selling a commercial property, it is essential to have an accurate area report”. In Houston, more than 60% of shopping centers have outdated floorplans that do not reflect the right square footage, leaving tenants, owners, and realtors at risk of law suits.
The Process
Our team knew upfront that coordinating among the different stakeholders (Architects, engineers, project owners, and tenants), was essential to the success of this project. Following PMI’s standards for project management, our team summarized the process as follows:
Field Planning
The 1st step in this effort was to breakdown the site down into two parts, outdoor scanning and indoor scanning. Outdoor area was then divided up into common areas (parking & driveways), and private areas (loading zones behind the buildings). The challenge with a commercial retail center is that even on the weekend, traffic does not stop so the outdoor common areas had to be done late at night or early in the morning, unless a traffic management plant was implemented. Indoor areas with limited access were identified using an old floorplan, and details were discussed with the tenants. Entry to the space on the weekend was not feasible.
The 2nd step in planning was to estimate the number of laser scans needed. Outdoor scans were planned using google earth and estimated to be 108 scans behind the buildings, and 150 scans in the common areas. Indoor scans were estimated based on the old floorplans but that could never be accurate until we physically walk the site.
Table 1. Outdoor 3D Scanning
| Area | Private Areas (Loading Zones) | Common Areas (Parking/Driveways) |
| Est. number of laser scans | 108 | 150 |
Table 2. Indoor 3D Scanning
| Area | Limited Access | Indoor Common |
| Est. number of laser scans | 33 | 411 |
3rd step in planning phase was to decide on the number of imaging technicians needed for both indoor and outdoor, decide on whether or not a colored pointcloud was needed for the job or if a black and white pointcloud would be sufficient.
Colored pointcloud adds about 3 minutes to each scan. These factors along with the minimum spatial resolution needed for the project would help us estimate duration of each scan, leading to better planning and scheduling.
Faro X-330 was selected for the outdoor work, this scanner has a range of 330 meters with low noise performance. This phase is also essential for determining the scan resolution before going to the field. Resolution determines the spacing between pointcloud points. For example 1/1 resolution tells the scanner to capture a point every 1.15 mm at a 10 m range. In other words, if the object of interest is 10 meters away, the pointcloud data will be spatially spaced every 1.15 mm in all directions. If a lower resolution selected, for example ¼, the pointcloud spacing will be every 6.1 mm in all directions at 10 meters. Quality was another parameter that needed to be determined.
Scan quality depicts the rotation speed of the scanner. The slower the rotation, the more data can be sampled for a higher quality pointcloud. The chosen scan settings for outdoor were resolution = 1/5, and quality = 3x. The scan size for each point was = 8192×3414 almost 28 million points, yielding a scan time of 3:17 minutes per scan point.
Indoor scan settings were also determined based on the average ceiling height and size of multiple areas. Indoor scan settings were set at resolution = 1/8 and quality = 4x, which resulted and a scan size of almost 11 million points and took 2:47 minutes per scan. Assuming 2 minutes for mobilizing the tripod from one scan location to the next, we were able to estimate duration on site as follows:
Outdoor Scan Duration:
Total Number of Outdoor Scans (258 scans) X [Duration of one scan (3:17 minutes) + Mobilization (3 minutes)] = 1621 Minutes = 27 hrs. Assuming only one scanner is at work.
Indoor Scan Duration:
Total Number of Indoor Scans (444 scans) X [Duration of once scan (2:47 minutes) + Mobilization (2 minutes)] = 2,123 minutes = 35.4 hrs. Assuming one scanner is at work
The 4th step in the planning phase was to build a simple traffic management plan to ensure minimum disruption to the center’s visitors. Reality IMT’s team had to be dynamic and move fast on blocking different sections and opening the ones that were successfully scanned.
Field Imaging and Scanning
Three laser scanners were deployed to capture the outdoor area along with 3 scanning technicians, and 2 flagmen. The 1st outdoor scan was taken at 5:20 am and the last scan was taken at 6:00 pm. The 2nd day, 3 indoor scanners were deployed and the job was complete within 14 hours.
Pointcloud Registration and Data Processing
While our field crew was out doing the indoor scanning on the 2nd day, our 3D modeling team starting registering the pointcloud data back at the office. Using optimized workstation computers with multiple graphics cards, processing time for the project took 15 Hours.
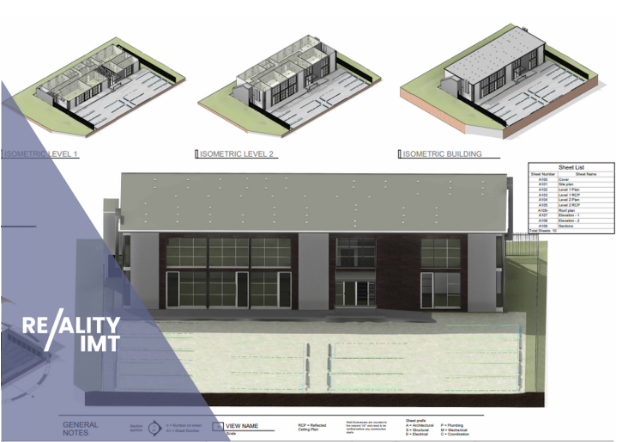
Pointcloud to BIM Modeling
Pointcloud data was imported into Autodesk software and the 3D modeling began. 3D modeling includes connecting points in space, generating a mesh file, and then modeling the texture and material of as-builts. Modeling took about 50 Hours.
The Results
10.5 acres of buildings, driveways, and parking lots were delivered in 3D CAD format within 10 days. Files were sent to project owners, architects, and engineers working on this effort. The feedback was extremely positive, and according to our client, it will be very hard to go back to manual methods after utilizing the 3D laser scan to BIM technology. Reality IMT saved the client time, increased their work efficiency, and digitized the project to help make accurate and immediate BOMA analysis.